




자세 측정 시스템




제품 특징
MS-100A0은 MEMS(Micro-Mechanical Technology) 기반의 3자유도 자세입니다.
고성능 MEMS 자이로 스코프 및 MEMS 가속도계가 내장 된 측정 시스템은 필터링 알고리즘을 통해 캐리어의 피치 각도, 롤 각도 및 헤딩 각도를 실시간으로 계산합니다.고정밀 북쪽 찾기를 달성하기 위해 자력계와 선택적으로 일치하며 출력 3축 각속도 및 3축 가속도는 모션 제어에 사용됩니다.
제품특성
- 자세 정확도 0.1° 이상
- 자세 측정 범위 ±90°
- 사용온도 범위 : -40~65℃
- 진동환경 : 10~2000Hz, 6g(RMS)
- 풍부한 인터페이스 유형, RS232, RS422, CAN 및 기타 표준 인터페이스 지원
- 방수 씰 디자인
전기적 특성
- 전원 공급 장치: 5V(typ.), 사용자 정의 가능한 넓은 전압 입력 12~36V
- 정격 전력: 0.5W(최대)
- 리플: 100mV(첨두치)
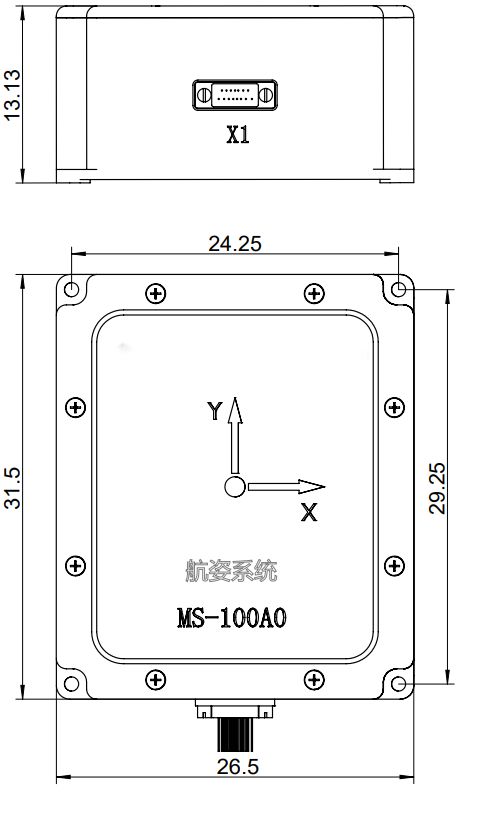
기계적 치수
기술적 지표
| 자이로 매개변수 | ||||
| 모수 |
시험 조건 | 전형적인 가치 |
최대값 | 단위 |
| 동적 측정 범위 |
|
| 450 | º/초 |
| 제로 바이어스 안정성 | 앨런 분산, Z축 | 0.8 |
| º/시 |
| Allan 분산, X축 및 Y축 | 1.6 |
| º/시 | |
| 10초 평균, X, Y축 (-40℃~+80℃, 항온) | 6 |
| º/시 | |
| 1초 평균, X, Y축 (-40℃~+80℃, 항온) | 9 |
| º/시 | |
| 제로 오프셋 | 제로 오프셋 범위 | ±0.2 |
| º/초 |
| 전체 온도 범위에서 제로 바이어스 변경 | ±0.06 |
| º/초 | |
| 시작 간 반복성 | 0.006 |
| º/초 | |
| 매일 시작 반복 | 0.009 |
| º/초 | |
| 제로 바이어스에 대한 선형 가속의 영향 | 0.002 |
| º/초 | |
| 영점 오프셋에 대한 진동의 영향, 진동 전후 변화 | 0.002 |
| º/초 | |
| 영점 오프셋에 대한 진동의 영향, 진동 전 변화 | 0.002 |
| º/초 | |
| 스케일 팩터 | 배율 계수 정확도, Z축 | 0.3 |
| % |
| 배율 계수 정확도, X, Y축 | 0.6 |
| % | |
| 스케일 팩터 비선형성, Z축 | 0.01 |
| %FS | |
| 스케일 팩터 비선형성, X, Y 축 | 0.02 |
| %FS | |
| 앵글 랜덤 워크 |
| 0.001 |
| °/√시간 |
|
소음 밀도 |
| 0.001 |
| °/초/√시간 |
| 해결 |
| 3.052×10−7 |
| º/s/LSB |
| 대역폭 |
| 200 |
| Hz |
| 가속도계 매개변수 | ||||
| 모수 |
시험 조건 |
전형적인 가치 | 최대값 | 단위 |
| 동적 측정 범위 |
| 16 |
| g |
| 제로 바이어스 안정성 | 앨런 분산 | 0.03 |
| mg |
| 평균 10초 (-40℃~+80℃, 항온) | 0.2 |
| mg | |
| 평균 1초(-40℃~+80℃, 항온) | 0..3 |
| mg | |
| 제로 오프셋 | 제로 오프셋 범위 | 5 |
| mg |
|
전체 온도 범위에서 제로 오프셋 변동(피크 대 피크) | 5 |
| mg | |
| 시작 간 반복성 | 0.5 |
| mg | |
| 매일 시작 반복 | 0.8 |
| mg | |
| 제로 바이어스 온도 계수 | 0.05 | 0.1 | mg/℃ | |
| 스케일 팩터 | 스케일 팩터 정확도 | 0.5 |
| % |
| 스케일 팩터 비선형성 | 0.1 |
| %FS | |
| 속도 랜덤 워크 |
| 0.029 |
| m/s/√시간 |
| 소음 밀도 |
| 0.025 |
| mg/√Hz |
| 해결 |
| 1.221×10−8 |
| g/LSB |
| 대역폭 |
| 200 |
| Hz |
| 자력계 매개변수(선택사항) | ||||
| 모수 | 시험 조건 |
전형적인 가치 | 최대값 |
단위 |
| 동적 측정 범위 |
| 2.5 |
| 가우스 |
| 제로 오프셋 | 비자성 환경 | 15 |
| mgauss |
| 방향 정확도 | ||||
| 자기 방향 정확도 |
| 0.5 |
| ° |
| 수평 자세 정확도 | ||||
|
피치 각도 정확도 |
| 0.1 |
| ° |
| 롤 각도 정확도 |
| 0.1 |
| ° |
| 자이로 매개변수 | ||||
| 모수 |
시험 조건 | 전형적인 가치 |
최대값 | 단위 |
| 동적 측정 범위 |
|
| 450 | º/초 |
| 제로 바이어스 안정성 | 앨런 분산, Z축 | 0.8 |
| º/시 |
| Allan 분산, X축 및 Y축 | 1.6 |
| º/시 | |
| 10초 평균, X, Y축 (-40℃~+80℃, 항온) | 6 |
| º/시 | |
| 1초 평균, X, Y축 (-40℃~+80℃, 항온) | 9 |
| º/시 | |
| 제로 오프셋 | 제로 오프셋 범위 | ±0.2 |
| º/초 |
| 전체 온도 범위에서 제로 바이어스 변경 | ±0.06 |
| º/초 | |
| 시작 간 반복성 | 0.006 |
| º/초 | |
| 매일 시작 반복 | 0.009 |
| º/초 | |
| 제로 바이어스에 대한 선형 가속의 영향 | 0.002 |
| º/초 | |
| 영점 오프셋에 대한 진동의 영향, 진동 전후 변화 | 0.002 |
| º/초 | |
| 영점 오프셋에 대한 진동의 영향, 진동 전 변화 | 0.002 |
| º/초 | |
| 스케일 팩터 | 배율 계수 정확도, Z축 | 0.3 |
| % |
| 배율 계수 정확도, X, Y축 | 0.6 |
| % | |
| 스케일 팩터 비선형성, Z축 | 0.01 |
| %FS | |
| 스케일 팩터 비선형성, X, Y 축 | 0.02 |
| %FS | |
| 앵글 랜덤 워크 |
| 0.001 |
| °/√시간 |
|
소음 밀도 |
| 0.001 |
| °/초/√시간 |
| 해결 |
| 3.052×10−7 |
| º/s/LSB |
| 대역폭 |
| 200 |
| Hz |
| 가속도계 매개변수 | ||||
| 모수 |
시험 조건 |
전형적인 가치 | 최대값 | 단위 |
| 동적 측정 범위 |
| 16 |
| g |
| 제로 바이어스 안정성 | 앨런 분산 | 0.03 |
| mg |
| 평균 10초 (-40℃~+80℃, 항온) | 0.2 |
| mg | |
| 평균 1초(-40℃~+80℃, 항온) | 0..3 |
| mg | |
| 제로 오프셋 | 제로 오프셋 범위 | 5 |
| mg |
|
전체 온도 범위에서 제로 오프셋 변동(피크 대 피크) | 5 |
| mg | |
| 시작 간 반복성 | 0.5 |
| mg | |
| 매일 시작 반복 | 0.8 |
| mg | |
| 제로 바이어스 온도 계수 | 0.05 | 0.1 | mg/℃ | |
| 스케일 팩터 | 스케일 팩터 정확도 | 0.5 |
| % |
| 스케일 팩터 비선형성 | 0.1 |
| %FS | |
| 속도 랜덤 워크 |
| 0.029 |
| m/s/√시간 |
| 소음 밀도 |
| 0.025 |
| mg/√Hz |
| 해결 |
| 1.221×10−8 |
| g/LSB |
| 대역폭 |
| 200 |
| Hz |
| 자력계 매개변수(선택사항) | ||||
| 모수 | 시험 조건 |
전형적인 가치 | 최대값 |
단위 |
| 동적 측정 범위 |
| 2.5 |
| 가우스 |
| 제로 오프셋 | 비자성 환경 | 15 |
| mgauss |
| 방향 정확도 | ||||
| 자기 방향 정확도 |
| 0.5 |
| ° |
| 수평 자세 정확도 | ||||
|
피치 각도 정확도 |
| 0.1 |
| ° |
| 롤 각도 정확도 |
| 0.1 |
| ° |


